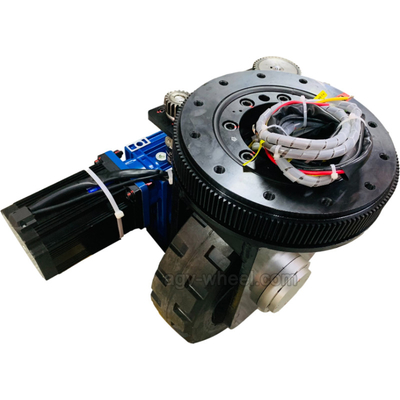
Altas ruedas resistentes del robot del rodillo impulsor 15km/H del motor de CA de la tracción de la carga de goma de la pisada 2T
-
Alta luz
rodillo impulsor del motor de CA 2T
,rodillo impulsor del motor de CA 15km/h
,ruedas resistentes del robot 15km/h
-
Pisada de la ruedaSoild de goma
-
Diámetro de rueda400m m
-
Carga2t
-
velocidad15km/h
-
Poder de la tracción2000W
-
Poder de dirección750W
-
Esfuerzo de torsión de la salida nominal143Nm
-
Escena del usoAl aire libre
-
Lugar de origenGuangzhou, China
-
Nombre de la marcaZHLUN
-
Número de modeloZL-490
-
Cantidad de orden mínimaNegociable
-
PrecioNegotiable
-
Detalles de empaquetadoEmbalaje: Caja de madera
-
Tiempo de entrega25 días
-
Condiciones de pagoL/C, T/T
-
Capacidad de la fuente1000 pedazos por mes
Altas ruedas resistentes del robot del rodillo impulsor 15km/H del motor de CA de la tracción de la carga de goma de la pisada 2T


El robot resistente de la pisada de goma rueda alto poder de la tracción de la carga 2T
Especificación
|
No
|
Artículo
|
Unidad
|
Datos
|
|
1
|
Altura de la instalación
|
milímetro
|
490
|
|
2
|
Carga
|
Kilogramo
|
2000
|
|
3
|
Tipo del motor
|
/
|
BLDC/Servo
|
|
4
|
Motor de la tracción
|
Kilovatio
|
2
|
|
5
|
Ratio de la velocidad
|
/
|
1:15
|
|
6
|
Motor de dirección
|
Kilovatio
|
0,75
|
|
7
|
Velocidad
|
kilómetro por hora
|
15
|
|
8
|
Diámetro de rueda
|
milímetro
|
400
|
|
9
|
Anchura de la rueda
|
milímetro
|
100
|
|
10
|
Sensor
|
/
|
Opcional
|
|
11
|
Max.Torque
|
Nanómetro
|
143
|
|
Algunos parámetros pueden ser ajustados
|
|||
Características
La estructura antivibraciones de ruedas y la dirección del alto-esfuerzo de torsión de ruedas con los transportes rodantes afilados riguroso se diseñan para cumplir los requisitos funcionales.
De acuerdo con la dinámica específica de la disposición y de vehículo de la rueda, el modelo cinemático rotatorio así como los modelos dinámicos rectos y rotatorios del AGV se establecen.
Para verificar bien las características del movimiento de ruedas bajo carga pesada en tres estados del movimiento incluyendo el movimiento recto, la uno mismo-rotación y la rotación alrededor de cierto punto, las simulaciones en ADAMS y los experimentos de la fábrica todos se han conducido.
Los resultados de la simulación indican que las fuerzas normales y de fricción de ruedas son muy estables a excepción de algunas pequeñas oscilaciones, que son causadas por la distribución de carga del no-centro en el AGV.
Los resultados experimentales en la conducción de la velocidad del AGV han demostrado directamente que su exactitud de colocación es bastante para el uso en plantas de fabricación reales de los aviones.
Un nuevo plan al aire libre de la disposición de las ruedas para un AGV resistente omnidireccional se propone, que aumenta el funcionamiento y la capacidad móvil del AGV. Una función de la colaboración persona-máquina también es ofrecida por el AGV para transportar los objetos grandes inteligente y económicamente en Heavy Industries aeroespacial y otra.
![]()
![]()
![]()
Nuestros productos se venden en todo el mundo, puede estar seguro de todo el proceso de nuestros productos.