El uno mismo dirigido autónomo bidireccional de los vehículos del AGV 600kg dirigió los vehículos
-
Alta luz
vehículos dirigidos autónomos del AGV 600kg
,Vehículos dirigidos autónomos del AGV
,el uno mismo 600kg dirigió los vehículos
-
Componentes de la basePLC, motor
-
UsoManipulación de materiales
-
dimensiónL1875*W580*H350
-
Carga útil600kg
-
MovimientoBidireccional
-
MaterialAcero inoxidable
-
Peso (kilogramos)250
-
CertificadosCE
-
Lugar de origenGuangzhou, China
-
Nombre de la marcaZHLUN
-
CertificaciónISO9001
-
Número de modeloZL-TR-K1
-
Cantidad de orden mínimaNegociable
-
PrecioNegotiable
-
Detalles de empaquetadoEmbalaje: Caja de madera
-
Tiempo de entrega25 días
-
Condiciones de pagoL/C, T/T, Western Union
-
Capacidad de la fuente1000 pedazos por mes
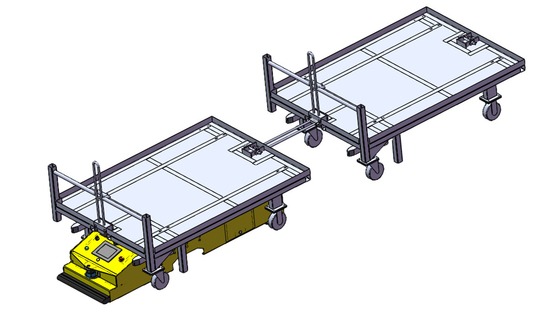
El uno mismo dirigido autónomo bidireccional de los vehículos del AGV 600kg dirigió los vehículos
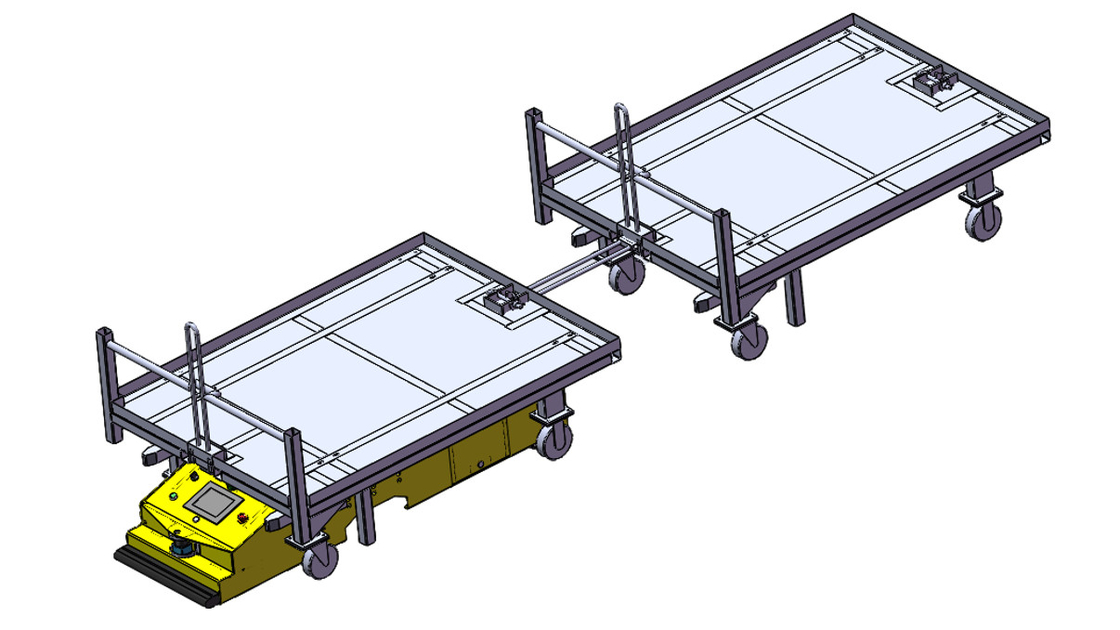
Agv automático de Warehouse del vehículo de la guía del rodillo impulsor del AGV Logitech para la industria
El AGV es un indicador estándar, tren múltiple de alta velocidad, eléctrico diseñado y construido por Alstom. Alstom ofrece al AGV en configuraciones a partir del siete a catorce carros, asentando a 245 a 446 personas. Los trenes se construyen de las unidades que comprenden tres coches y conductor-remolques del solo-coche. La velocidad comercial máxima es 360 kilómetros por hora.
![]()
El uso de las carretillas del AGV en fábricas de fabricación está llegando a ser cada vez más común. Puede realizar la dirección sin tripulación, y realiza la automatización de la transferencia off-line, e intermediaria en línea, automática automática de productos a los materiales, que es una buena solución para mejorar la eficacia de la logística de la producción. En el proceso de fabricación de la fabricación, el transporte del cruz-piso se realiza a menudo, que es también realizable para el AGV. Actualmente, los fabricantes más potentes del AGV pueden alcanzar el transporte automático a través de pisos. La dificultad del transporte del cruz-piso del AGV es solucionar la tecnología del AGV que las carretillas montan automáticamente los elevadores.
¿Cómo el coche del AGV toma el elevador automáticamente?
El proceso del coche del AGV que toma el elevador se divide automáticamente en los pasos siguientes:
![]()
1. El coche del AGV llega la puerta y las paradas del elevador, y el sistema de control del AGV envía una instrucción de la petición de la entrada del elevador al elevador a través de la red.
2. Después de que el elevador reciba la señal del sistema de control del AGV, abre la puerta y mantiene el estado normalmente abierto. Y reacción la señal que el elevador se ha abierto en el sistema de control del AGV.
3. Después de recibir la señal que se ha abierto el elevador, los problemas del sistema de control del AGV una instrucción de conducción a la carretilla del AGV, y a la carretilla del AGV entran en el elevador.
4. Después de que el coche del AGV entre en el elevador, envía una instrucción del piso al elevador. El elevador recibe la instrucción, cierra el elevador, y llega el piso señalado.
5. Después de que el elevador alcance el piso señalado, la puerta del elevador abre y guarda el estado normalmente abierto. Y envíe la puerta del elevador la señal normalmente abierta al sistema de control del AGV.
6. Después de que el sistema de control del AGV reciba la llegada en el piso señalado, envía una instrucción de conducción a la carretilla del AGV, y la carretilla del AGV utiliza el elevador.
7. Después de que la carretilla del AGV salga el elevador, el sistema de control del AGV retroactúa una señal al elevador, la puerta del elevador es cerrada, y se incorpora el ciclo siguiente.
En el proceso entero, podemos entenderlo como la interacción entre el coche del AGV, el AGV que envía el sistema de gestión, y el elevador inteligente. Incluye la interacción entre el coche del AGV y el AGV que envían el sistema de gestión a través de la red inalámbrica y el AGV que envía intercambio del sistema de gestión y de información entre los elevadores.
![]()
Aquí está principalmente compartir con usted el proceso de la interacción del sistema y del elevador del AGV: El AGV solicita el registro de la reacción del elevador del → del registro del elevador es peticiones acertadas del AGV del → del piso de la reacción del elevador del → del piso del elevador de las preguntas del AGV del → que el AGV del → del control de la puerta del elevador del → de la puerta del elevador incorpora/que parada del AGV del → del elevador de las salidas que envía el lanzamiento de cierre de apertura del elevador del → de la puerta del elevador del → de la petición de la puerta con éxito.
Con la mejora de la tecnología del AGV, los escenarios del uso del AGV serán ampliados más a fondo. En el futuro, las carretillas del AGV podrán más adaptarse a los escenarios complejos del trabajo tales como obstáculos múltiples, pisos cruzados, y almacenes estorbados, y pueden asegurar más la seguridad, la estabilidad, la confiabilidad y el orden de la logística que maneja proceso.
|
Artículo
|
Especificaciones
|
|
Modelo
|
ZL-TR-K1 |
|
Dimensiones
|
L1875*W580*H350
|
|
Método de la guía
|
Navegación magnética
|
|
Dirección que camina
|
Adelante, buey, parte posterior
|
|
Velocidad delantera
|
90m/min
|
|
Capacidad de carga
|
600Kg
|
|
Batería
|
Batería de litio
|
|
Método de carga
|
Carga inalámbrica
|
|
La manera de exhibición eléctrica
|
Visualización electrónica
|
|
Seguridad que detecta distancia
|
3M
|
|
Forma de la alarma
|
Alarma de la música y alarma ligera
|
|
Sistema eléctrico
|
Motor de BLDC
|
|
Sistema de seguridad
|
Evitación infrarroja del obstáculo, diseño anticolisión mecánico, botón de paro de emergencia
|
Imagen de la fábrica
![]()
![]()
![]()
Nuestros productos se venden en todo el mundo, puede estar seguro de todo el proceso de nuestros productos.